


We introduce MuJoCo Playground, a fully open-source framework for robot
learning built with MJX, with the express goal of streamlining simulation,
training, and sim-to-real transfer onto robots.
With a simple installation process (pip install playground), researchers can train policies in minutes on a single GPU.
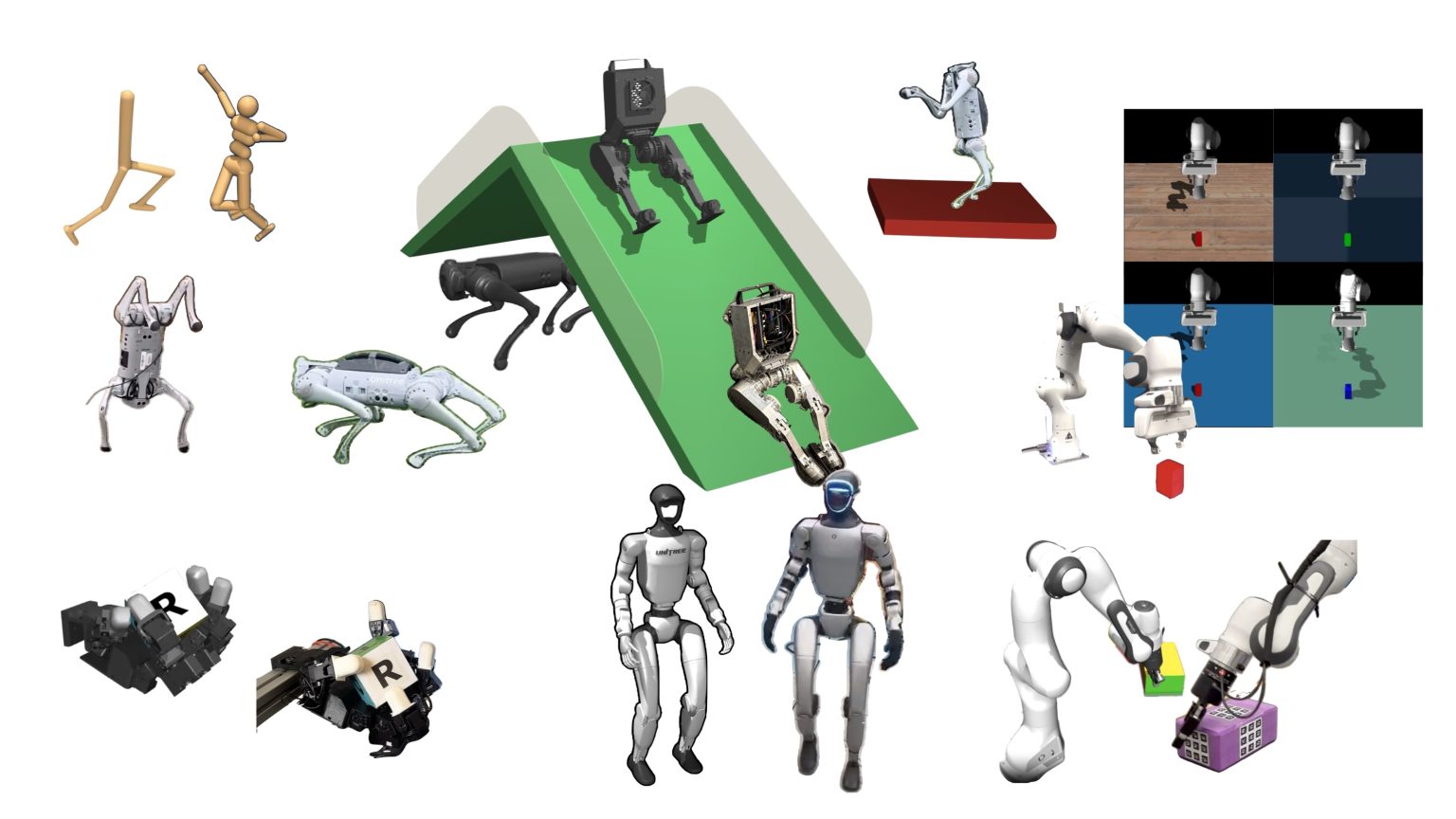
Playground supports diverse robotic platforms, including quadrupeds,
humanoids, dexterous hands, and robotic arms, and enables zero-shot
sim-to-real transfer from both state and pixel inputs. This is achieved
through an integrated stack comprising a physics engine, batch renderer,
and training environments. MuJoCo Playground was a community effort involving multiple groups, and we hope it proves valuable to researchers and developers alike.
Disclaimer: All videos on this page except the teaser are shown in real-time (1x speed).
